3.1.3. 非结构网格概述
(1) 基本概念
相比于贴体曲线结构网格有着对应的通用坐标系 (\(\xi, \eta, \zeta\) ), 坐标转换 Jacobian 矩阵
(式 Eq.3.2.15 ) 和相应的通用坐标控制方程 (如,式 Eq.3.2.14 ),
非结构网格没有隐性定义的网格坐标结构 (结构网格的通用坐标系是一个均匀笛卡尔网格)。
非结构网格通常应用于有限体积法中,使用网格中心格式。
以对流-扩散方程 (Eq.3.1.8 ) 为例, 写为网格单元 (控制体) 上的积分形式:
(3.1.31) \[\frac{\partial}{\partial t} \int_V{\phi \, dV}
+ \int_S{\mathbf{n} \cdot (\phi \mathbf{v}) dA}
= \int_S{\mathbf{n} \cdot (\Gamma \nabla \phi) dA}
+ \int_V{S_{\phi} \, dV}\]
记 \(\mathbf{A}=A \mathbf{n}\) , \(\mathbf{A}= A_x \mathbf{i} + A_y \mathbf{j} + A_z \mathbf{k}\) ,
\(| \mathbf{A} | = \sqrt{A_x^2+A_y^2+A_z^2}\) 。
网格面指向外侧的单位法向量 (unit outward vector normal to face) \(\mathbf{n}\) ,
网格面积向量 (face area vector) \(\mathbf{A}\) 。
网格体积 (volume) 基于 Gauss theorem 计算:
\(V=\int_V \nabla(x \mathbf{i}) dV = \int_S x\mathbf{i} \cdot \mathbf{n} dA\) , 得:
(3.1.32) \[V \approx \frac{1}{3} \left[
\sum_f x_f A_{x,f} + \sum_f y_f A_{y,f} + \sum_f z_f A_{z,f} \right]\]
其中 \([x_f, y_f, z_f]\) 是 \(f\) 面中心的坐标。
假设 \(f\) 面由 \(N_v\) 个网格点 (vertex) 组成, 坐标为 \(\mathbf{v}_{i}\) ,
这些点按照向量 \(\mathbf{A}\) 的 右手原则 排列。
那么, 网格面的面积为:
(3.1.33) \[\mathbf{A} = \frac{1}{2} \sum_{i=3}^{N_v}
\left[ (\mathbf{v}_{i-1} - \mathbf{v}_1) \times
(\mathbf{v}_{i} - \mathbf{v}_1) \right]\]
网格面的中心坐标为:
(3.1.34) \[\mathbf{x}_{c,f} = \frac{1}{N_v} \sum_{i=1}^{N_v} \mathbf{v}_i\]
(2) 有限体积离散形式
时间导数项 (transient term), 以一阶前向为例:
(3.1.35) \[\frac{\partial}{\partial t} \int_V{\phi \, dV} \approx
\frac{\hat{\phi}\hat{V} - \phi V}{\Delta t}\]
扩散项 (diffusion term):
(3.1.36) \[\int_S{(\Gamma \nabla \phi) \cdot d\mathbf{A}} \approx
\sum_f (\Gamma \nabla \phi)_f \cdot \mathbf{A}_f\]
对流项 (convection term):
(3.1.37) \[\int_S{(\phi \mathbf{v}) \cdot d\mathbf{A}} \approx
\sum_f (\phi \mathbf{v})_f \cdot \mathbf{A}_f \phi_f =
\sum_f \dot m_f \phi_f\]
其中, \(\dot m_f\) 是通过面 \(f\) 的质量流量。
源项 (source term):
(3.1.38) \[\int_V{S_{\phi} \, dV} \approx S_{\phi} V\]
(3) 数据结构
一套非结构网格必须包含以下信息:
几何信息 :
网格维度 (2D, 3D)
网格总数 (ncells)
网格面总数 (nfaces)
边界网格面总数 (nbfaces)
网格点总数 (nvertices)
网格中心坐标 (xc[ncells], yc[ncells], zc[ncells])
网格面中心坐标 (xf[nfaces], yf[nfaces], zf[nfaces])
网格点坐标 (xv[nvertices], yv[nvertices], zv[nvertices])
网格面法向向量 (fnm[nfaces, 3])
网格体积 (vol[ncells])
网格面面积 (areaf[nfaces])
链接信息 :
每个网格包含的网格面 (num_face[ncells])
每个网格包含的网格点 (num_vertices_c[ncells])
每个网格面包含的网格点 (num_vertices_f[nfaces])
网格指向网格面的链接表 (link_cell_to_face[ncells, nfaces])
网格面指向网格的链接表 (link_face_to_cell[nfaces, 2])
网格面指向网格点的链接表 (link_face_to_vertices[nfaces, :])
网格指向网格点的链接表 (link_cell_to_vertices[ncells, :])
指定网格面是否为边界网格面的链接表 (link_face_to_bface[nfaces])
给出边界网格面全局编号的链接表 (link_bface_to_face[nbfaces])
编号原则 :
每个网格有一个全局编号
每个网格面有一个全局编号
每个边界网格面有一个全局编号
每个网格点有一个全局编号
每个网格对它自己的网格面给出一个局部编号
每个网格面对它两侧的网格给出一个局部编号
(4) 网格面中心/网格点的标量插值
由于数据存储在网格中心,因此网格面中心和网格点上的数据,需要进行插值。
网格面中心的反距离插值:
(3.1.39) \[\phi_\text{fc} = \frac{\phi_L d_L + \phi_R d_R}{1/d_L+1/d_R}\]
其中, \(d_L, d_R\) 是网格面中心到两侧网格中心的距离,上式中也可以使用平方距离进行加权。
网格点通常有多个相邻的网格,其反距离插值为:
(3.1.40) \[\phi_\text{v} = \sum_{i=1}^{N_\text{c}} w_{\text{v},i} \phi_i, \;\;
w_{\text{v},i} = \frac{1/d_i}{\sum_{k=1}^{N_\text{c}} 1/d_k}\]
(5) 网格中心的标量梯度
基于 Gauss theorem :
(3.1.41) \[\nabla \phi = \frac{1}{V} \int_S \phi d \mathbf{A} = \frac{1}{V} \sum_f \phi_f |\mathbf{A}_f|\]
网格面中心的值 \(\phi_f\) 可以使用反距离插值 (Eq.3.1.39 ) 得到 (显式格式)。
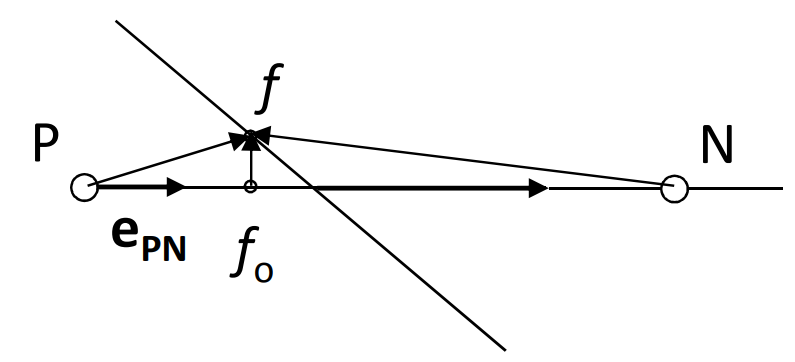
也可以基于隐式格式全场迭代计算, 对式 Eq.3.1.41 中每一个网格面 \(f\) :
(3.1.42) \[\begin{split}\begin{array}{l}
\phi_f = \phi_{f_0} + \nabla \phi_{f_0} \cdot \mathbf{r}_{f_0f} & \\
\phi_{f_0} = (1-f_P) \phi_P + f_P \phi_N, &
\nabla \phi_{f_0} = (1-f_P) \nabla \phi_P + f_P \nabla \phi_N, \\
f_P = \left(\mathbf{r}_{Pf} \cdot \mathbf{e}_{PN} \right) / |\mathbf{r}_{PN}|, &
\mathbf{r}_{f_0f} = \mathbf{r}_{Pf} - (\mathbf{r}_{Pf} \cdot \mathbf{e}_{PN}) \mathbf{e}_{PN}
\end{array}\end{split}\]
基于最小二乘法 :
根据 \(\phi_i - \phi_0 \approx \nabla \phi_0 \cdot \mathbf{r}_{0i}\) , 可以将网格 \(0\) 中心 \(P\)
与相邻的若干网格 \(i\) 联立超定方程组 \(A \nabla \phi_0 = B\) :
(3.1.43) \[\begin{split}\left[\begin{array}{c}
\Delta x_{01} & \Delta y_{01} & \Delta z_{01} \\
\vdots & \vdots & \vdots \\
\Delta x_{0N} & \Delta y_{0N} & \Delta z_{0N}
\end{array}\right] \nabla \phi_0 =
\left[\begin{array}{c}
\phi_1 - \phi_0 \\
\vdots\\
\phi_N - \phi_0
\end{array}\right]\end{split}\]
则, \(\nabla \phi_0 = (A^T A)^{-1} A^T B\) 。
(3.1.44) \[\begin{split}\nabla \phi_0 = \left[\begin{array}{c}
\sum_i C_i^x w_i (\phi_i - \phi_0) \\
\sum_i C_i^y w_i (\phi_i - \phi_0) \\
\sum_i C_i^z w_i (\phi_i - \phi_0)
\end{array}\right]\end{split}\]
其中, \(w_i = 1/|\mathbf{r}_{0i}|\) ,
(3.1.45) \[\begin{split}C_i^x =& \; \alpha_{i,1} - \frac{r_{12}}{r_{11}} \alpha_{i,2} + \psi \alpha_{i,3} \\
C_i^y =& \; \alpha_{i,2} - \frac{r_{23}}{r_{22}} \alpha_{i,3} \\
C_i^z =& \; \alpha_{i,3}\end{split}\]
(3.1.46) \[\begin{split}&\alpha_{i,1} = \frac{w_i \Delta x_i}{r_{11}^2},
\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;
\alpha_{i,2} = \frac{1}{r_{22}^2}
\left( w_i \Delta y_i - \frac{r_{12}}{r_{11}} w_i \Delta x_i \right) \\
&\alpha_{i,3} = \frac{1}{r_{33}^2} \left( w_i \Delta z_i - \frac{r_{23}}{r_{22}} w_i \Delta y_i
+ \psi w_i \Delta x_i \right), \;\;\;\;\;\;\;\;
\psi = \frac{r_{12}r_{23} - r_{13}r_{22}}{r_{11}r_{22}}\end{split}\]
(3.1.47) \[\begin{split}&r_{11} = \sqrt{\sum_i (w_i \Delta x_i)^2},
&r_{12} = \frac{1}{r_{11}} \sum_i (w_i^2 \Delta x_i \Delta y_i) \\
&r_{13} = \frac{1}{r_{11}} \sum_i (w_i^2 \Delta x_i \Delta z_i),
&r_{22} = \sqrt{\sum_i (w_i\Delta y_i)^2 - r_{12}^2} \\
&r_{23} = \frac{1}{r_{22}} \sum_i (w_i^2 \Delta y_i \Delta z_i) - r_{12}r_{13}, \;\;\;\;
&r_{33} = \sqrt{\sum_i (w_i \Delta z_i)^2 - r_{13}^2 - r_{23}^2}\end{split}\]
最小二乘梯度重构算法需要在每个网格额外存储 \(r_{11}, r_{22}, r_{33}, r_{12}, r_{13}, r_{23}\) 六个常数。
(6) 网格面中心的梯度/通量插值
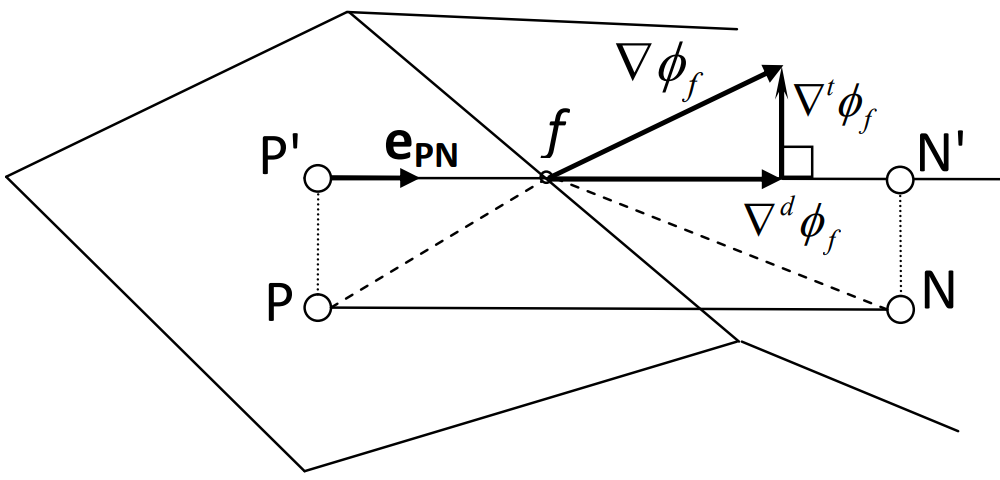
梯度插值 :
网格面中心 \(f\) 处的梯度 \(\nabla \phi\) 可以分解为两个分量
\(\nabla \phi_{f} = \nabla^d \phi_{f} + \nabla^t \phi_{f}\) 。
其中, \(d\) 为网格面两侧的网格中心 P, N 的连线方向
(单位向量 \(\mathbf{e}_{PN} = \mathbf{r}_{PN}/|\mathbf{r}_{PN}|\) )。
\(t\) 为垂直方向。
(3.1.48) \[\begin{split}\nabla \phi_f = \frac{\phi_N-\phi_P}{|\mathbf{r}_{PN}|}\mathbf{e}_{PN} +
\overline{\nabla \phi_f} - (\overline{\nabla \phi_f} \cdot \mathbf{e}_{PN}) \mathbf{e}_{PN} + \\
\frac{(\nabla \phi_N - \nabla \phi_P) \cdot \mathbf{r}_{PP'} }{|\mathbf{r}_{PN}|}\mathbf{e}_{PN}\end{split}\]
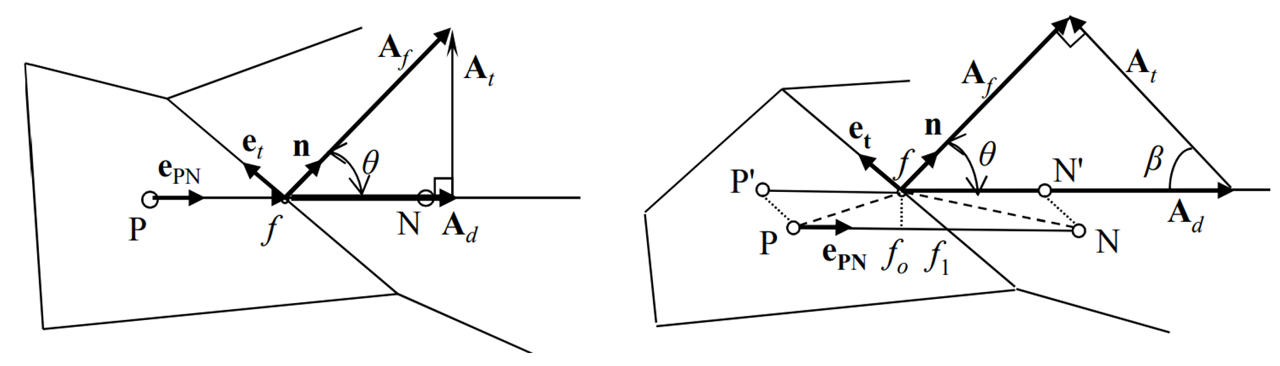
通量插值 :
将网格面向量拆分为两个向量之和 \(\mathbf{A}_f = \mathbf{A}_d + \mathbf{A}_t\) ,
其中, \(d\) 为网格面两侧的网格中心 P, N 的连线方向, \(t\) 为另一个方向。那么,
(3.1.49) \[\nabla \phi_f \cdot \mathbf{A}_f = |\mathbf{A}_d| \frac{\phi_N-\phi_P}{|\mathbf{r}_{PN}|} +
\overline{\nabla \phi}_f \cdot \mathbf{A}_t\]
其中,第一项称为正交项 (orthogonal term),
第二项为非正交项 (non-orthogonal term, cross diffusion term), 这一项可以视为源项。
当 PN 连线不经过网格面中心时 (下右图), 需要额外的修正:
(3.1.50) \[\nabla \phi_f \cdot \mathbf{A}_f = |\mathbf{A}_d| \frac{\phi_N-\phi_P}{|\mathbf{r}_{PN}|} +
\overline{\nabla \phi}_f \cdot \mathbf{A}_t +
\frac{(\nabla \phi_N - \nabla \phi_P) \cdot \mathbf{r}_{PP'} }{|\mathbf{r}_{PN}|}\mathbf{A}_d\]
其中,
(3.1.51) \[\begin{split}\mathbf{r}_{PP'} =& |\mathbf{r}_{f_1f}| \mathbf{e}_{t} \\
|\mathbf{r}_{f_1f}| =& |\mathbf{r}_{f_0f}| (|\mathbf{A}_d|/|\mathbf{A}_f|) \\
\mathbf{r}_{f_0f} =& \mathbf{r}_{Pf} - (\mathbf{r}_{Pf} \cdot \mathbf{e}_{PN}) \mathbf{e}_{PN} \\
\frac{|\mathbf{A}_d|}{|\mathbf{r}_{PN}|} =&
\frac{\mathbf{A}_f \cdot \mathbf{A}_f}{\mathbf{A}_f \cdot \mathbf{r}_{PN}}\end{split}\]
定义 \(\mathbf{A}_t\) 有多种方式,常见的有最小修正 (左, minimum correction)
和超松弛修正 (右, over-relaxed correction), 推荐使用后者以提高在扭曲网格上的收敛性。
Minimum correction:
(3.1.52) \[\begin{split}\mathbf{A}_d =& (\mathbf{A}_f \cdot \mathbf{e}_{PN}) \mathbf{e}_{PN} \\
\mathbf{A}_t =& \mathbf{A}_f - \mathbf{A}_d\end{split}\]
Over-relaxed correction:
(3.1.53) \[\begin{split}\mathbf{A}_d =& \frac{\mathbf{A}_f \cdot \mathbf{A}_f}
{\mathbf{A}_f \cdot \mathbf{e}_{PN}} \mathbf{e}_{PN} \\
\mathbf{A}_t =& \mathbf{A}_f - \mathbf{A}_d\end{split}\]
Note
Orthogonal term is treated implicitly, whereas the cross diffusion term is treated as
a source term in a deferred correction approach.
Over-relaxed approach is preferred, because the coefficient of the implicit term is
greater than that of other methods, and it increases with the skew angle \(\theta\) .
Thus, the diagonal dominance of the coefficient matrix is enhanced.
式 Eq.3.1.50 中, \(\overline{\nabla \phi}_f\)
是网格面中心的梯度插值, 简单的做法为线性插值:
(3.1.54) \[\overline{\nabla \phi}_f = (1-f_P) \nabla \phi_P + f_P \nabla \phi_N, \;\;
f_P = \frac{\mathbf{r}_{Pf} \cdot \mathbf{e}_{PN}}{ |\mathbf{r}_{PN}| }\]
更准确的做法为 Eq.3.1.48 。